Research Projects
-
 Eyecandy Robotics RL Pipeline
Eyecandy Robotics RL Pipelinereinforcement learning effort for Eyecandy Robotics, building and iterating policies in Isaac Lab, validating transfer through sim-2-sim workflows, and integrating control with Feetech actuators for reliable behavior across the stack.
-
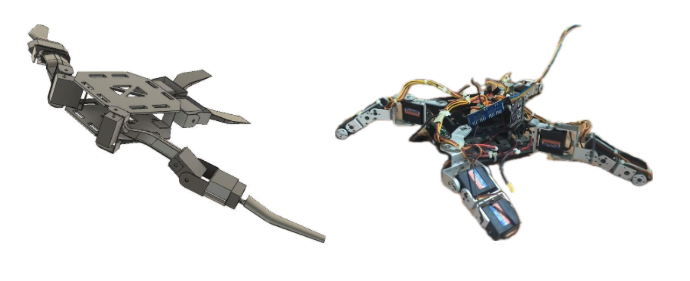
 Auto-Bot
Auto-BotHalf-scale autonomous robot model featuring full kinematic simulation and embedded control systems.
-
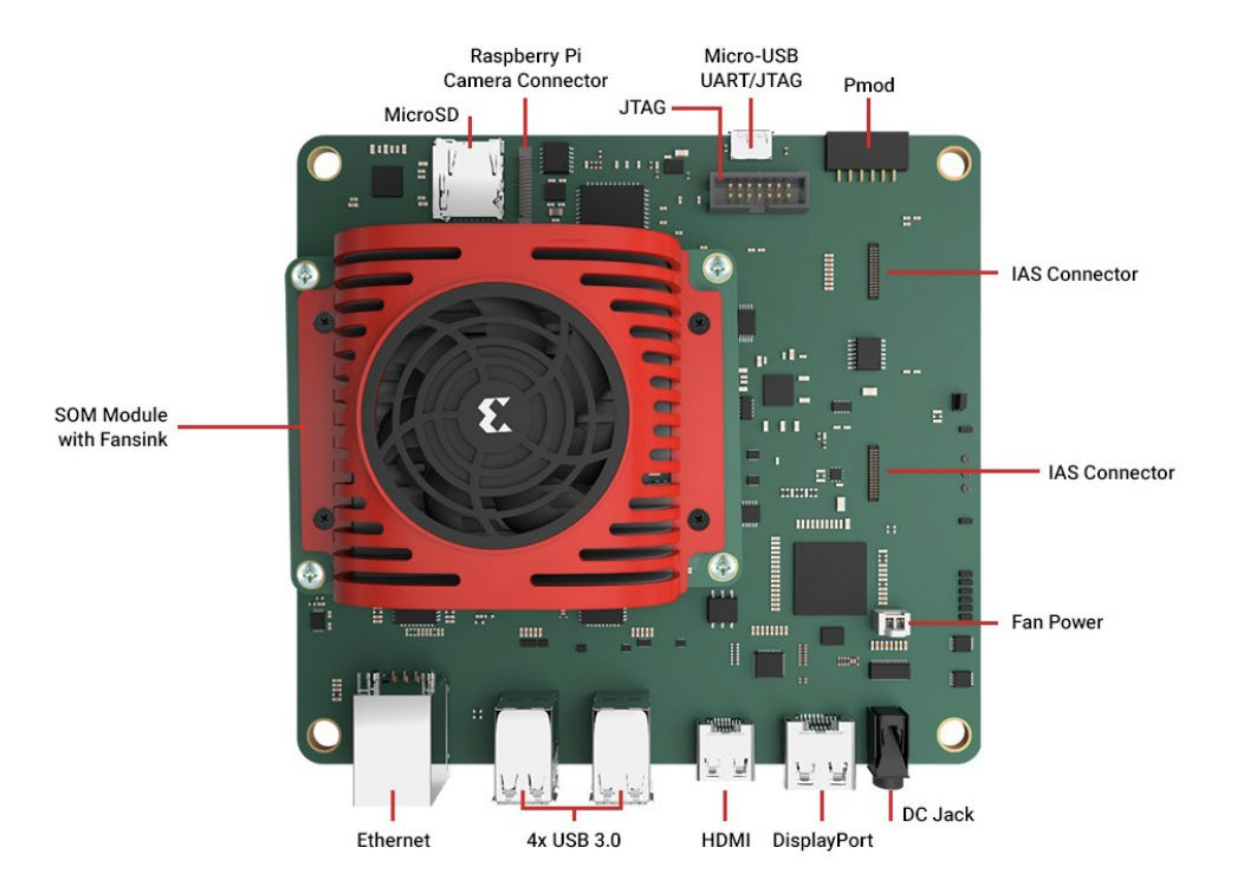 Image Convolution on FPGA
Image Convolution on FPGAHardware accelerated image processing pipeline with custom memory controllers.
-
 MuJoCo Simulation
MuJoCo SimulationAdvanced physics simulation environment for testing robotic control algorithms and reinforcement learning agents.
-
 NVFP4 Implementation
NVFP4 ImplementationImplementation of NVIDIA's quantization paper for optimized deep learning inference on edge devices.
-
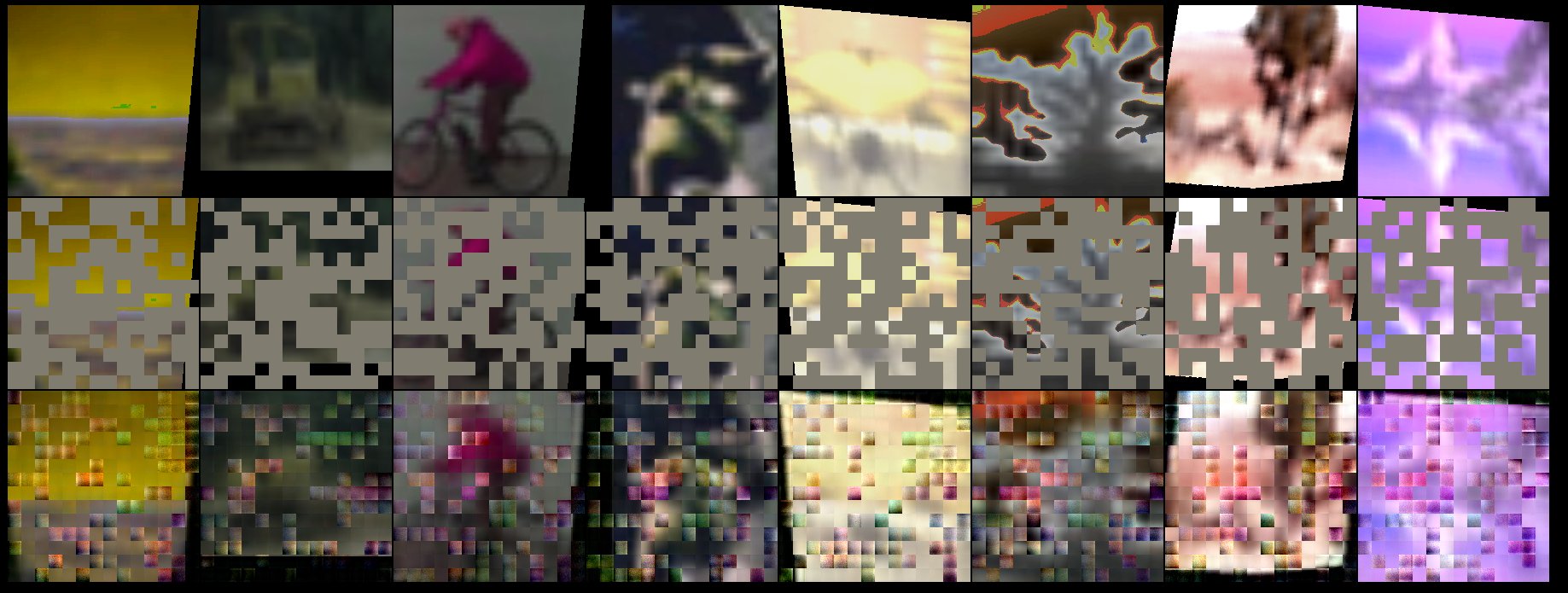
 Hyperspectral Anomaly Detection
Hyperspectral Anomaly DetectionMachine learning algorithms to detect anomalies in hyperspectral imaging data for remote sensing.